How ADAS Sees the Road: Cameras, Radar, and Sensor Trade-Offs
Part 2 of the Advanced Driver Assistance Systems (ADAS) series on AutoTechToday
In the previous article, we established why driver assistance systems exist and why they deliberately stop short of automation. That explanation answers an important philosophical question. This article answers a more practical one: how does a vehicle actually see the road?
Unlike human drivers, ADAS does not rely on intuition or experience. It relies on sensors. Understanding what these sensors can — and cannot — perceive is essential to understanding both the strengths and the limits of modern ADAS.
For a complete overview of what ADAS is, why it exists, and how its components fit together, see our ADAS foundation guide.
Why “Seeing” Is the Hardest Part of Driver Assistance
Every ADAS function begins with perception. Before a system can warn, brake, or steer, it must first detect what is around the vehicle. This sounds straightforward, but in real traffic, perception is the hardest problem to solve.
Road environments are unstructured. Lighting changes constantly. Weather degrades visibility. Road markings fade. Objects overlap, occlude each other, and move unpredictably.
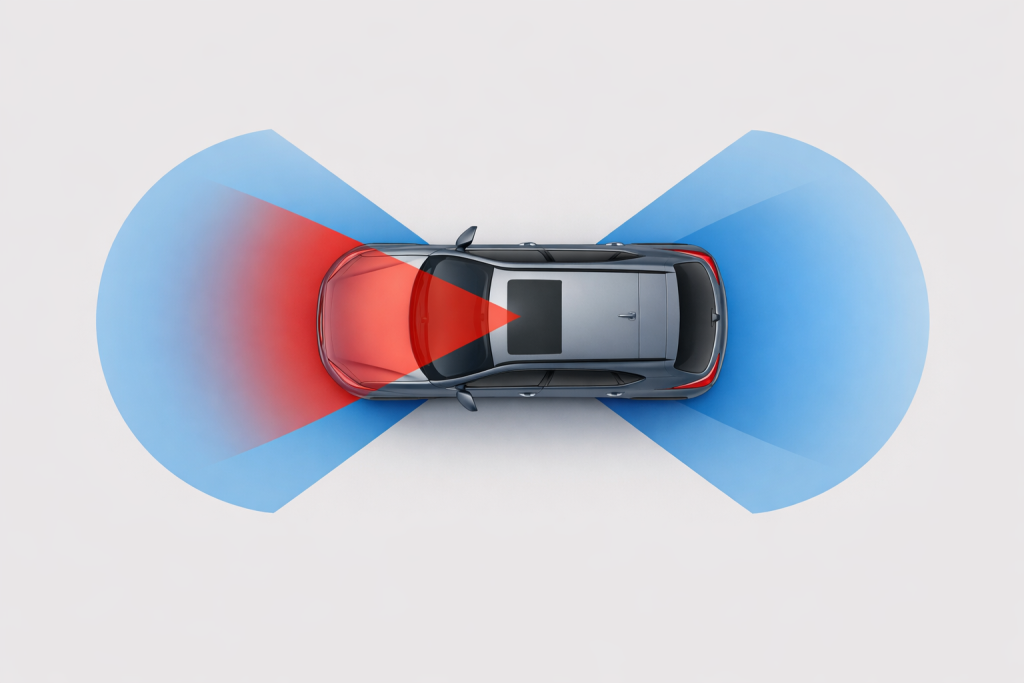
No single sensor can handle all of this reliably. That is why modern ADAS systems rely on multiple sensor types, each covering a different aspect of perception.
The Three Core Sensor Types Used in ADAS
Although manufacturers differ in implementation, most production ADAS systems rely on three primary sensor categories:
- Cameras
- Radar
- Ultrasonic sensors
Each of these sensors “sees” the world in a fundamentally different way. Understanding those differences is more important than memorizing feature lists.
Cameras: Understanding the Scene
Cameras are the most information-rich sensors in ADAS. They capture detailed visual data, allowing systems to recognize lane markings, traffic signs, vehicles, pedestrians, and cyclists.
From a human perspective, camera perception feels intuitive. After all, humans also rely on vision. But for a machine, interpreting images is computationally demanding.
Modern ADAS cameras use computer vision algorithms to extract meaning from raw pixel data. Edges, shapes, motion patterns, and contrast are combined to classify objects and road features.
The strength of cameras lies in classification. They are very good at answering questions like: Is that object a vehicle or a pedestrian? Is that marking a lane line or a shadow?
Their weakness is reliability under poor conditions. Low light, glare, fog, heavy rain, or snow can significantly reduce camera confidence.
Where Cameras Perform Best
- Clear daylight conditions
- Well-marked roads
- Urban environments with structured traffic
Where Cameras Struggle
- Night driving with glare
- Heavy rain, fog, or snow
- Faded or temporary lane markings
Radar: Measuring Distance and Motion
Radar sensors operate on a completely different principle. Instead of capturing images, radar emits radio waves and measures their reflections.
This allows radar to determine:
- Distance to objects
- Relative speed
- Direction of movement
Radar excels at what cameras struggle with: robust detection under poor visibility. Rain, fog, and darkness have little effect on radar performance.
This makes radar especially valuable for functions such as adaptive cruise control and forward collision warning.
However, radar provides limited object classification. It can tell that something is there and moving, but not precisely what that something is.
Radar Strengths
- Excellent range measurement
- Reliable in bad weather
- Accurate relative speed detection
Radar Limitations
- Poor shape recognition
- Limited ability to distinguish object types
Ultrasonic Sensors: Close-Range Awareness
Ultrasonic sensors are the simplest and most limited of the three sensor types. They operate at very short range and are primarily used for low-speed maneuvers.
Parking assistance and low-speed obstacle detection are their main applications.
Because of their short range, ultrasonic sensors play only a minor role in high-speed ADAS functions.
Why No Single Sensor Is Enough
It may seem tempting to ask: why not simply improve one sensor until it does everything?
The answer is physics. Each sensing method interacts with the environment differently. Improving one capability often worsens another.
This is why modern ADAS systems rely on sensor fusion.
Sensor Fusion: Building a Reliable Perception Model
To improve reliability, ADAS combines information from different sensor types into a single perception model rather than relying on any one sensor alone.
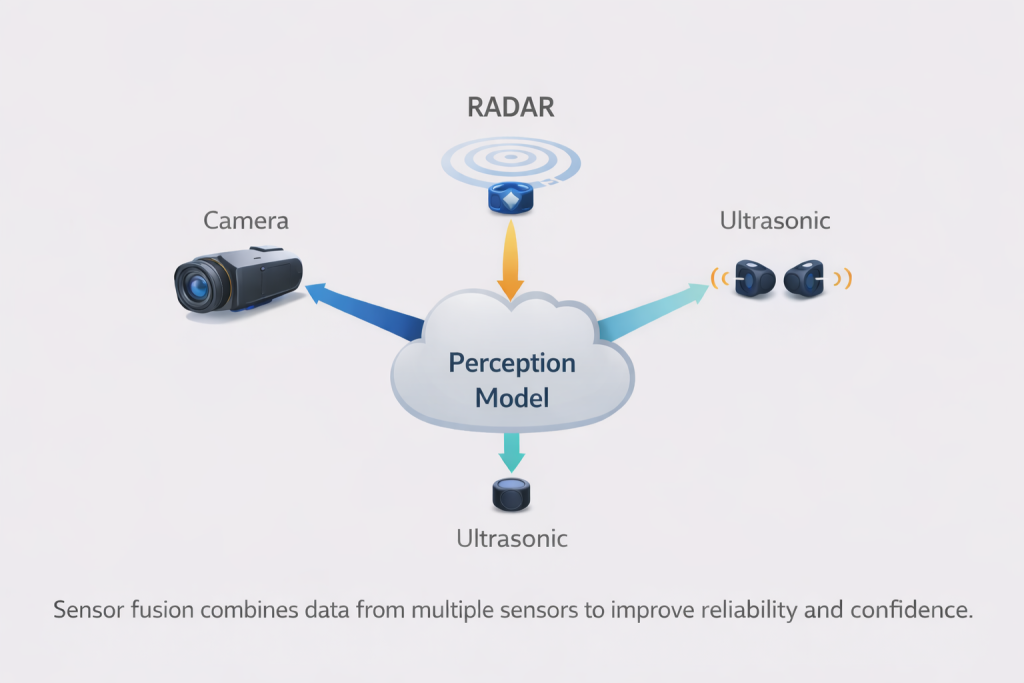
Sensor fusion does not mean averaging sensor outputs. It means intelligently combining them.
For example:
- Cameras classify an object as a vehicle
- Radar confirms its distance and speed
- The system gains confidence in both detection and prediction
When sensors disagree, ADAS systems reduce confidence or disengage. This behavior often frustrates drivers, but it is a deliberate safety choice.
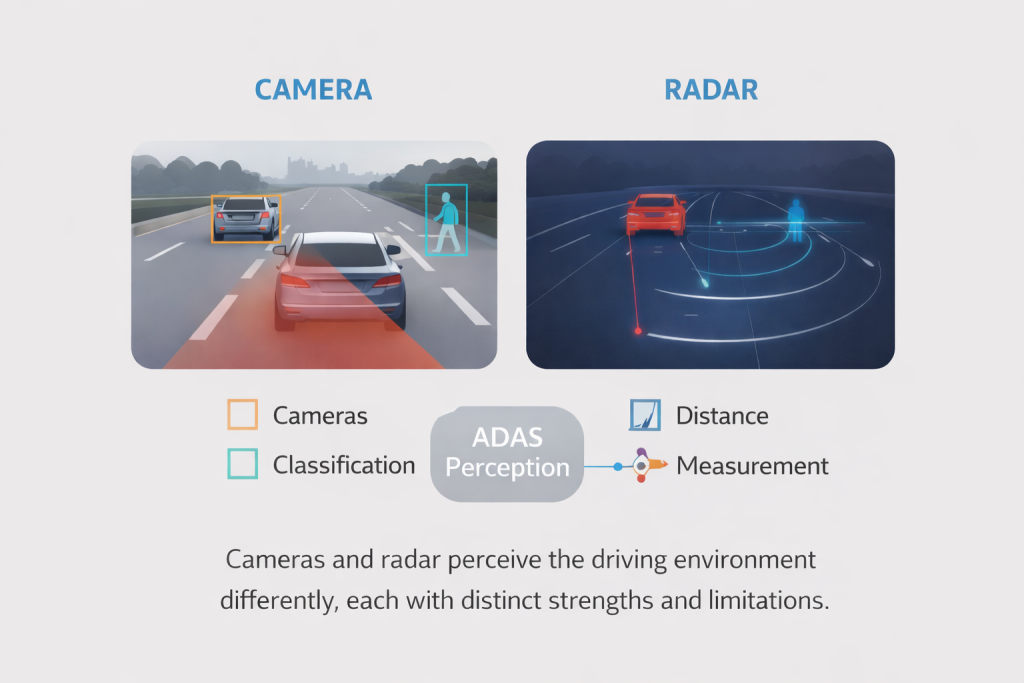
Practical Sensor Trade-Offs
Cameras and radar interpret the driving environment in fundamentally different ways, which is why modern ADAS systems rely on both rather than a single sensor.
| Sensor | Main Strength | Main Limitation | Typical Use |
|---|---|---|---|
| Camera | Object and lane recognition | Weather and lighting sensitivity | Lane keeping, sign recognition |
| Radar | Distance and speed measurement | Limited object classification | ACC, collision warning |
| Ultrasonic | Close-range detection | Very short range | Parking assistance |
Why ADAS Sometimes “Turns Off”
Drivers are often surprised when ADAS systems disengage. Rain starts falling. Lane markings disappear. A warning message appears.
This is not system failure. It is perception confidence dropping below safe thresholds.
Rather than acting on unreliable data, ADAS systems step back and return full control to the driver.
How This Fits Into the ADAS Architecture
Perception is only the first stage of ADAS. Once the environment is sensed, the system must interpret risk, decide on a response, and execute that response safely.
Those steps will be explored in the next article, which focuses on decision logic and risk thresholds.
Understanding sensors first makes that discussion far clearer.
Where This Article Fits in the Series
This article explained how ADAS systems perceive the road, why multiple sensors are necessary, and how trade-offs shape system behavior.
To see how perception fits alongside decision logic, intervention, and system limits, refer back to our Advanced Driver Assistance Systems (ADAS) foundation page.
The next article will examine how this perception data is turned into decisions: when to warn, when to intervene, and when to stay silent.